2266998 發表于 2015-12-9 11:14
車體運動,我用激光系統的,低速大概可以1-2毫米,
到位后,液壓卡緊,電伺服系統精確對位,2噸工件,精 ...
 ' r% O# W, _1 K" F7 N0 d/ |3 ^- {7 C& W
' r% O# W, _1 K" F7 N0 d/ |3 ^- {7 C& W2266998 發表于 2015-12-9 11:14
車體運動,我用激光系統的,低速大概可以1-2毫米,
到位后,液壓卡緊,電伺服系統精確對位,2噸工件,精 ...
胡gege 發表于 2015-12-9 11:23
指導談不上,說說自己不成熟的看法# w, ?5 N; M8 w& ~
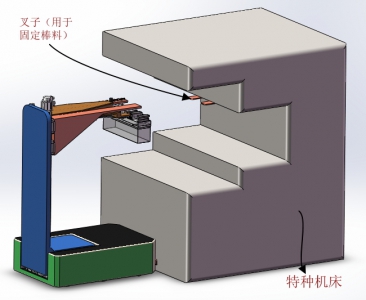
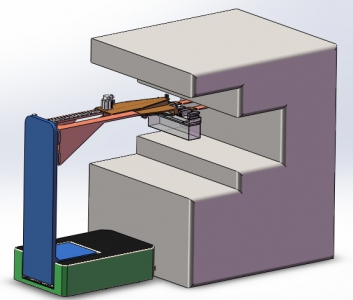
1.100GJ的物體采用你現在的結構臂不合適,共1200MM伸展出來受力不均勻
...
sonior 發表于 2015-12-9 14:24
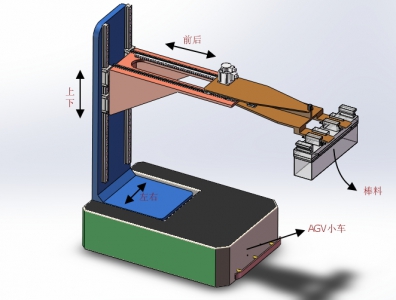
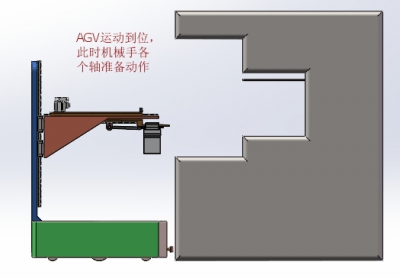
agv的運動我采用的是磁條系統,車的姿態偏移通過2個激光對射傳感器來調整姿態,但是磁條導引還有個缺點就 ...
| 歡迎光臨 機械社區 (http://m.whclglass.com.cn/) | Powered by Discuz! X3.5 |
